PRODUCTS CENTER

了解更多详细信息,请致电

或给我们留言
在线留言|
prev
next
|
JMWR型单轨吊智能无人驾驶系统创建时间: |
|
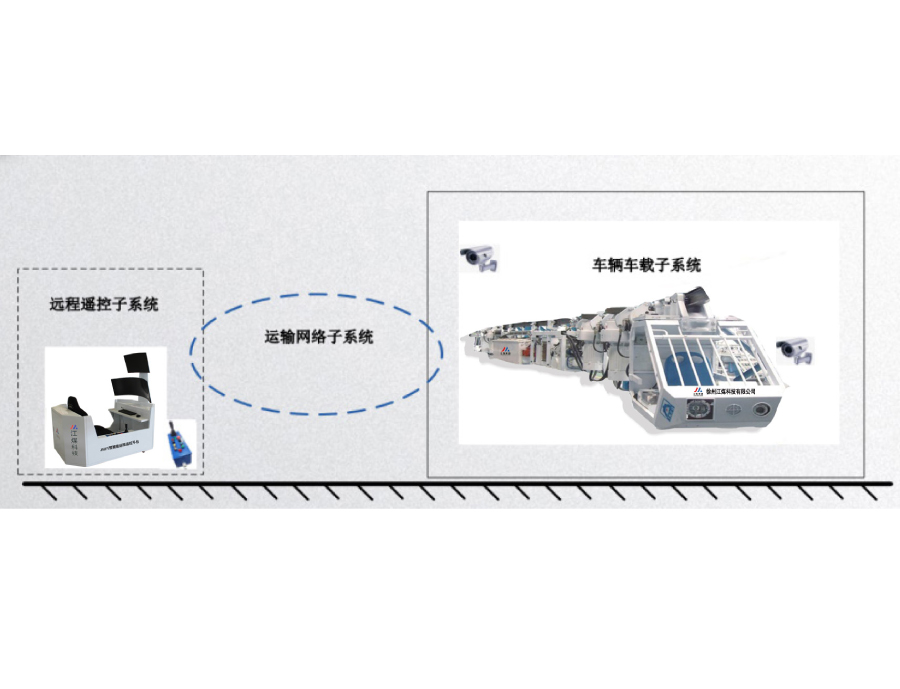
一、概述 单轨吊作为矿山有轨运输系统的主要设备,其高效稳定运行直接影响到煤矿运输任务的完成。由于井下工作环境较恶劣,多潮湿和粉尘,不稳定和不安全因素较多,造成传统人工驾驶单轨吊工作效率较低,运输成本居高不下,为此我公司设计一套完整的单轨吊智能无人驾驶系统,以WIFI6(5G)无线通信技术为传输平台,综合轨道运输监控技术、单轨吊精准定位技术、视频处理技术和单轨吊调度技术,对于减少或避免矿井重大生产运输安全事故,降低运输成本,提升矿井物料生产转运效率,具有重大的应用前景和战略价值。 二、系统组成 单轨吊智能无人驾驶系统主要由主控制系统、车载控制系统、定位系统、视频监控系统、通信系统组成。 主控制系统主要由智能远程遥控平台组成,智能远程遥控平台包括远程操作平台、嵌入式核心控制器、视频处理显示软件、状态信息处理显示软件等,是整个智能远程遥控系统的操作单元,主要完成对设备无线遥控、视频监控、设备工作状态监测记录等功能。智能远程遥控平台布置在地表的监控中心,界面采用视频及设备状态信息一体化显示,包括带有操作手柄和开关的操作单元、地面远程监测计算机、电源模块、显示器、光纤交换机等。 三、系统功能 1、智能无人驾驶 智能远程驾驶是通过智能远程遥控平台控制单轨吊的方式,使操作者完全脱离现场危险区域,在远距离比较安全的区域实现设备的所有控制功能。通过操作平台上的显示器可实时看到现场的画面及设备状态信息,同时可做路径规划,风门及转辙机等设备的联锁互动控制。 系统保留原车的操作方式,具备手动、井上远程、井下遥控三种操作方式。
井上远程驾驶
井下手动驾驶 2、精准定位 精准定位是通过定位装置实时获取机车位置信息和运动方向,使智能远程遥控驾驶系统做出正确的运动控制决策。该技术基于UWB技术,通过算法优化做精度校准,精度可控制在20cm。 3、路径规划(实现自主无人驾驶) 基于精准定位绘制电子地图,系统开发路径规划功能,主要通过在巷道中设置信号设备,各设备之间相互通信,组成一个信号采集、集中处理、闭塞控制系统,通过操作平台上路径规划系统输入单轨吊出发点和目的地位置,合理的调度单轨吊运行,与关联设备(井下风门、岔道等)做联锁控制,实现单轨吊的路径规划功能。 4、关联设备联锁控制 在单轨吊的运行路径中会对转辙机、风门及拦车网进行联锁控制。需要对关联设备做无线控制改造、状态监测、本地及远程控制,以实现路径规划后单轨吊的自动运行。在单轨吊要到达各点位之前,会提前对下一个关联设备做状态监测,需判断是否具备运行条件,只有监测符合关联设备才会启动控制功能,如转辙机周边是否无人,系统有无故障等,同时启动后会通过传感器判断转辙机是否切换到位。 5、视频监测 视频系统分两个部分,一部分安装在单轨吊上,对前后多个方向视频图像做实时采集,使操作人员实时观察单轨吊周边环境的状况,另一部分要安装在单轨吊运行轨迹上,实现特定区域的监视。系统由高清红外摄像头、嵌入式视频采集模块、无线网桥等组成。 6、数据监测 通过安装在单轨吊上的车载监测单元可实时采集车上的传感器信息,在远程操作平台上显示,以便操作人员及时了解设备状态。 通过对采集的数据进行分析,实现数据显示及阈值报警,同时也可根据客户需求加装传感器,如电压变送器、变流变送器、速度传感器等。
7、安全探测 安全探测是通过安装在单轨吊上传感器做环境感知,采用激光测距技术或AI摄像头技术,对设备周围路况信息进行采集分析,实现对单轨吊行驶过程中前方遭遇障碍物时的处理,执行鸣笛、减速、急停刹车等操作。 |
|




